6-DOF ROBOTIC ARM FOR ELEVATOR CONTROL 2020
HARDWARE | ROBOTICS
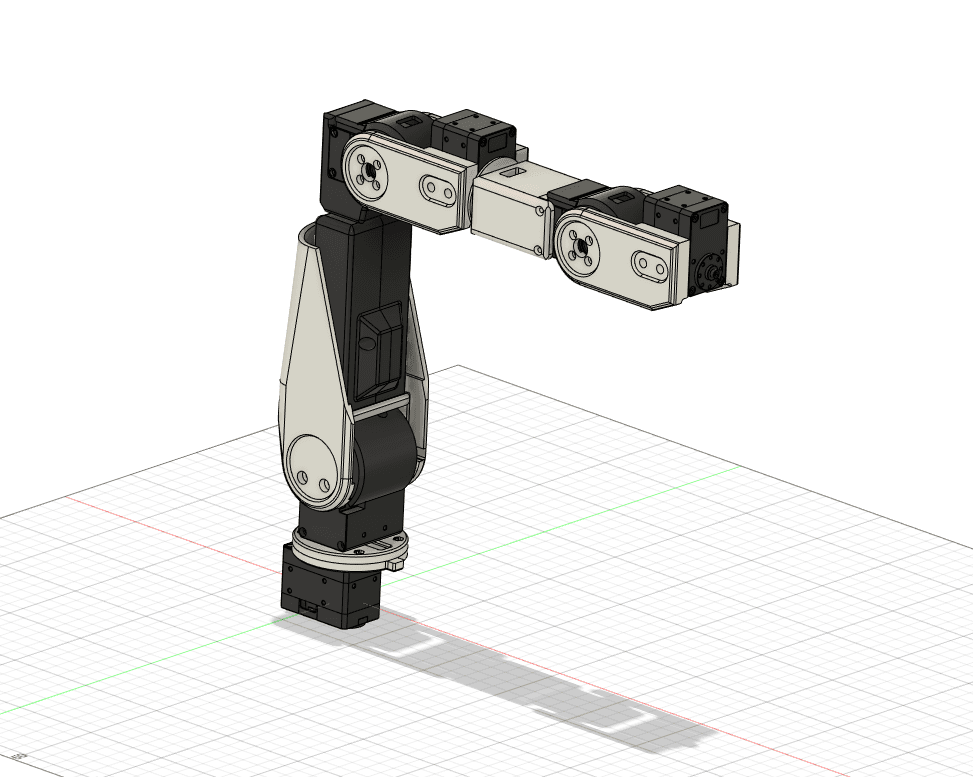
택배 로봇에 부착되는 엘리베이터 제어용 6축 로봇팔을 제작하였습니다. 6개의 축을 활용한 유연한 움직임이 가능하도록 설계되었으며, 상단에 장착된 센서를 통해 엘리베이터 버튼과의 거리를 측정하고, 로봇팔은 해당 위치로 정확히 이동해 리니어 모션 메커니즘을 통해 지정된 층의 버튼을 눌러 작동합니다.
We developed a 6-axis robotic arm designed to be mounted on a delivery robot for elevator control. The arm enables flexible movement using six degrees of freedom and utilizes a top-mounted sensor to measure the distance to elevator buttons. It then moves precisely to the target position and presses the appropriate floor button using a linear motion mechanism.
- ・ Production Method :
- Mechanical design and 3D printing fabrication
- ・ Client :
- 와트